


Was eine Rohrvortriebsmaschine eigentlich leistet
Eine Rohrvortriebsmaschine ist ein grabenloses Bausystem, das unterirdische Rohrleitungen verlegt, indem es gleichzeitig durch den Boden bohrt und vorgefertigte Rohrabschnitte aus einer oberflächennahen Startgrube in den ausgehobenen Tunnel schiebt. Die Maschine schneidet an der Bohrlochfläche, während an der Rückseite des Rohrstrangs angebrachte hydraulische Heber den nötigen Vorwärtsschub erzeugen, um sowohl den Schneidkopf als auch den wachsenden Rohrstrang durch den Boden voranzutreiben. Das Ergebnis ist eine vollständig ausgekleidete Pipeline, die in der Tiefe verlegt wird, ohne dass entlang der Pipelinetrasse ein durchgehender offener Graben ausgehoben werden muss.
Diese Methode – in manchen Zusammenhängen auch als Rohrvortrieb, Rohrrammung oder Microtunneling bezeichnet, wenn sie auf Bohrungen mit kleinerem Durchmesser mit ferngesteuerter Führung angewendet wird – hat sich zu einer der wichtigsten Techniken im unterirdischen Versorgungsbau entwickelt. Es wird zur Installation von Schwerkraftkanalisationsleitungen, Wasserübertragungsleitungen, Gasverteilungsleitungen, Telekommunikationsleitungen und Durchlässen unter Straßen, Eisenbahnen, Flüssen, Landebahnen und bebauten städtischen Gebieten verwendet, in denen ein offener Aushub unpraktisch oder schädlich wäre oder von Infrastrukturbetreibern und Planungsbehörden verboten wäre.
Die Rohrvortriebsmaschine selbst ist das Schneid- und Führungssystem an der Vorderseite des Betriebs – die Komponente, die den Bohrdurchmesser, die Bodenverträglichkeit, die Linien- und Neigungsgenauigkeit sowie die Fähigkeit zur Ortsbruststützung bestimmt. Alles andere bei einem Rohrvortrieb – der Vortriebsrahmen, der Druckring, die Zwischenvortriebsstationen, das Schmiersystem und die Abraumentfernungsanordnung – wird entsprechend den Anforderungen der Maschine und den spezifischen Bodenbedingungen des Projekts konfiguriert.
Die Kernkomponenten eines Rohrvortriebssystems
Eine komplette Rohrvortriebsanlage ist mehr als nur die Schneidmaschine. Es handelt sich um eine integrierte Baugruppe aus mechanischen, hydraulischen und Führungssystemen, die alle zuverlässig zusammenarbeiten müssen, damit der Betrieb sicher und online abläuft. Das Verständnis der Rolle jeder Komponente hilft Auftragnehmern und Projektingenieuren, bessere Entscheidungen bei der Auswahl der Ausrüstung zu treffen und vorherzusagen, wo Probleme am wahrscheinlichsten auftreten.
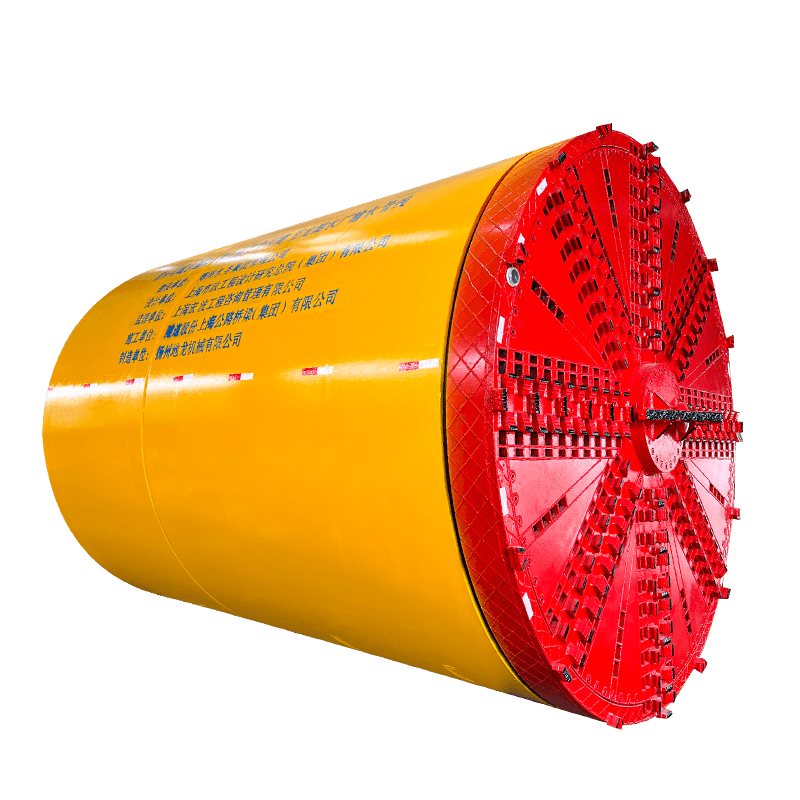
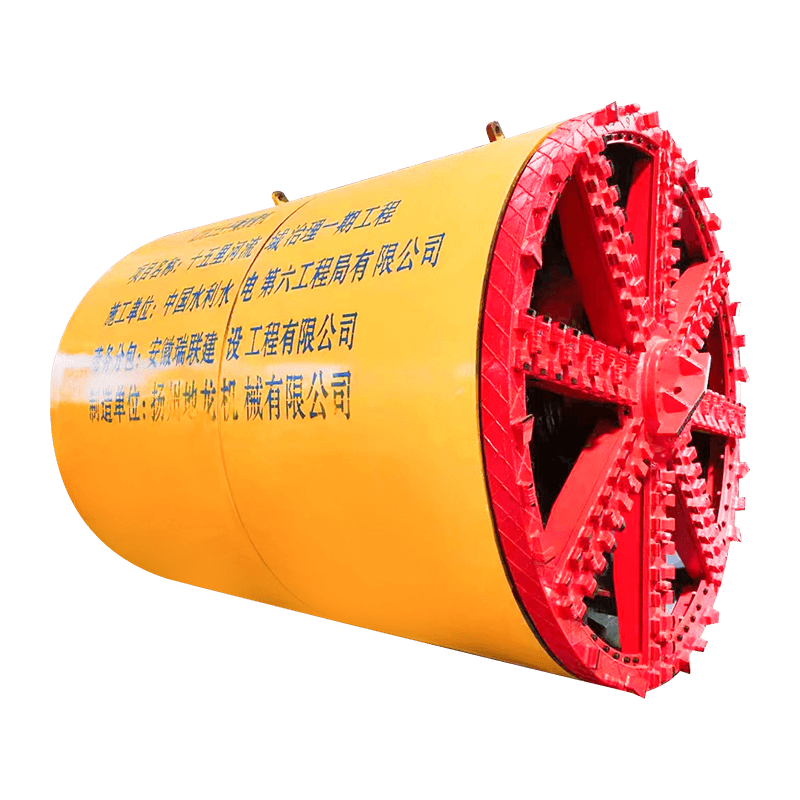
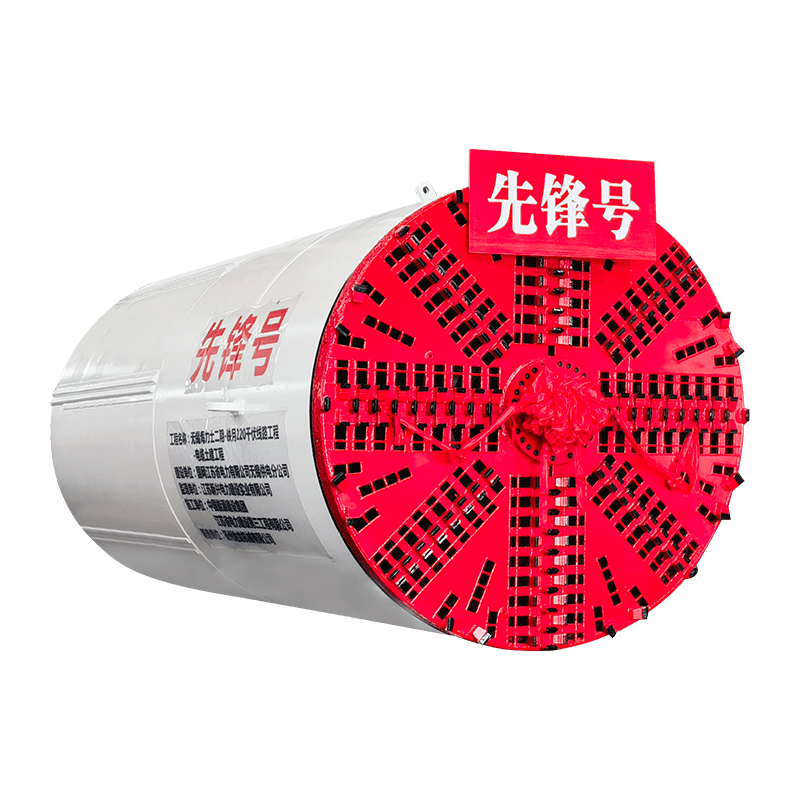
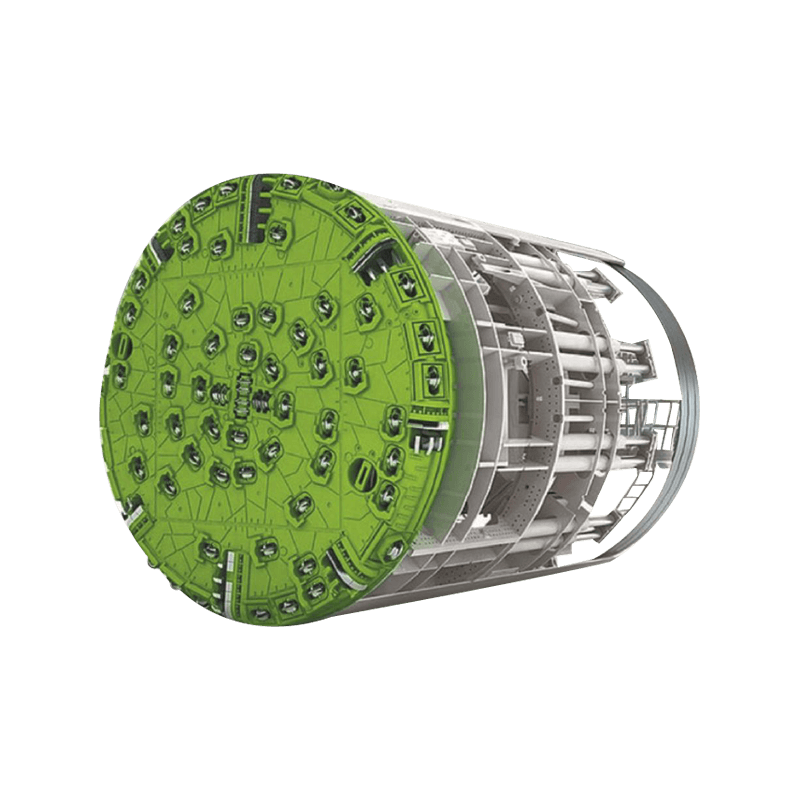
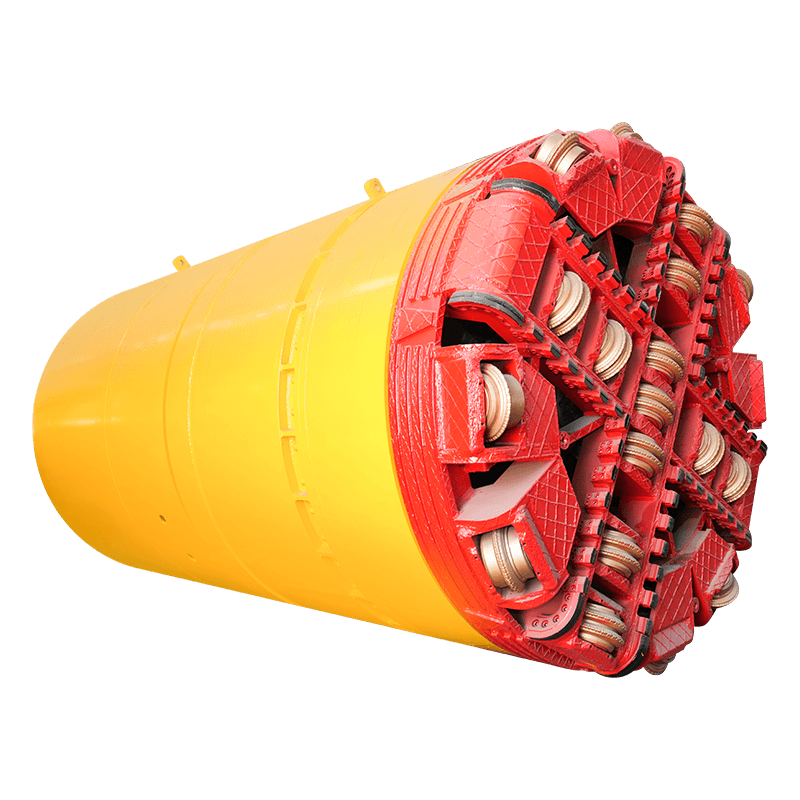
Der Schneidkopf und das Schild
Der Schneidkopf ist das vorderste Element des Rohrvortriebsmaschine , um den Boden auszuheben und ihn für den Abtransport durch die Rohrleitungsbohrung bereitzustellen. Das Design des Schneidkopfes variiert je nach Bodenbeschaffenheit erheblich. In weichem Boden – Ton, Schluff, Sand und Kies – wird typischerweise ein rotierender Scheiben- oder Speichenfräskopf mit Bodenbearbeitungsöffnungen verwendet, oft in Kombination mit Bentonit- oder Polymerinjektion, um die Ortsbrust zu stabilisieren und die Reibung zu reduzieren. In gemischtem Boden oder Gestein sind robustere Fräsköpfe mit Scheibenfräsern, Schleppmeißeln oder Wolframkarbid-Knopffräsern erforderlich, um das Material für den Abtransport zu zerkleinern. Der Schneidkopf ist in einem Stahlschild untergebracht, das an der Tunnelwand für Bodenabstützung sorgt und den Strukturkörper der Maschine bildet.
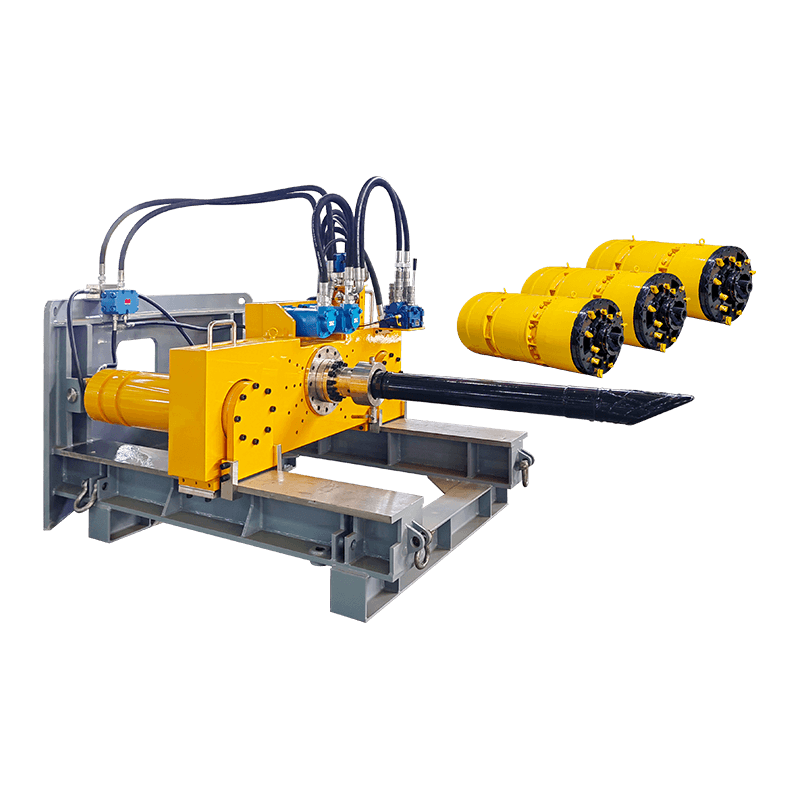
Der Wagenheberrahmen und die Schubzylinder
Der Hauptvortriebsrahmen wird in der Startgrube hinter dem Rohrstrang installiert und sorgt für die primäre Schubkraft, die die Maschine und die Rohre durch den Boden vorantreibt. Es besteht aus einem schweren Reaktionsrahmen aus Stahl, der an der Rückwand der Grube verankert ist und mit Hydraulikzylindern – typischerweise zwei bis vier Rammen mit großer Bohrung – ausgestattet ist, die gegen einen Druckring oder Druckring drücken, der an der Rückseite des letzten Rohrs im Strang sitzt. Die Vortriebskräfte bei Rohrvortriebsarbeiten sind erheblich: Mikrotunnelvortriebe mit kleinem Durchmesser erfordern möglicherweise 50–200 Tonnen Schubkraft, während Vortriebe mit großem Durchmesser in schwierigem Boden mit langen Rohrsträngen Schubkräfte von mehr als 1.000 bis 3.000 Tonnen erfordern können. Der Hubrahmen muss für die sichere Übertragung dieser Kräfte ausgelegt sein und die richtige Größe für den Rohrdurchmesser und den voraussichtlichen Bodenwiderstand des jeweiligen Antriebs haben.
Schmutzentfernungssystem
Beim Vortrieb muss kontinuierlich Aushubmaterial durch die Rohrleitungsbohrung aus der Tunnelwand entfernt werden. Die Methode der Abraumentfernung ist eine der Schlüsselvariablen, die die Typen von Rohrvortriebsmaschinen unterscheidet. Schlammschildmaschinen verwenden einen unter Druck stehenden Bentonit-Schlammkreislauf, um Bohrklein aufzuhängen und hydraulisch durch ein Schlammrohr zu einer Oberflächentrennanlage zu transportieren, wo die Feststoffe abgesaugt und der gereinigte Schlamm im Kreislauf geführt wird. Erddruckausgleichsmaschinen vermischen den ausgehobenen Boden mit Konditionierungsmitteln, um eine plastifizierte Masse zu erzeugen, die dann von einer archimedischen Förderschnecke durch die Rohrleitungsbohrung zur Startgrube gefördert wird. Bei Vortrieben mit größerem Durchmesser, bei denen der Zugang für Arbeiter praktisch ist und die Bodenverhältnisse stabil genug sind, um dies zu ermöglichen, wird der manuelle Aushub mit Handwerkzeugen und das Entfernen von Mulden immer noch eingesetzt.
Leit- und Lenksystem
Die Aufrechterhaltung der Linien- und Neigungsgenauigkeit während des gesamten Vortriebs ist von entscheidender Bedeutung – falsch verlegte Rohrleitungen verursachen Probleme mit dem hydraulischen Gefälle in Freispiegelkanälen, Verbindungsbelastungen in Druckleitungen und mögliche Konflikte mit bestehenden Leitungen. Rohrvortriebsmaschinen werden durch die Einstellung der Ausdehnung von hydraulischen Lenkzylindern gesteuert, die um den Schildumfang herum positioniert sind und den Maschinenkopf relativ zum folgenden Rohrstrang schwenken. Die Positionsüberwachung erfolgt durch einen in der Startgrube montierten Lasertheodoliten, der einen Strahl auf ein Ziel im Inneren der Maschine projiziert. Die Abweichung der Maschine vom Strahl wird vom Bediener abgelesen und über die Lenkzylinder korrigiert. Bei längeren Fahrten oder Kurven, bei denen eine einfache Laserlinie nicht ausreicht, kommen anspruchsvollere Leitsysteme mit Kreisel-Totalstationen oder Ringlaserkreiseln zum Einsatz.
Arten von Rohrvortriebsmaschinen und wann sie verwendet werden
Rohrvortriebsmaschinen sind kein einzelnes Produkt – es gibt sie in mehreren unterschiedlichen Konfigurationen, die jeweils für unterschiedliche Bohrdurchmesser, Bodenbedingungen und Projektanforderungen optimiert sind. Die Wahl des richtigen Maschinentyps ist die wichtigste Ausrüstungsentscheidung bei jedem Rohrvortriebsprojekt.
Mikrotunnelmaschinen (MTBM)
Mikrotunnelmaschinen sind ferngesteuerte Rohrvortriebssysteme, die für Bohrdurchmesser typischerweise zwischen 150 mm und 1.200 mm ausgelegt sind, wobei die Grenze zu größeren bemannten Einstiegssystemen projektspezifisch ist. Das entscheidende Merkmal einer Mikrotunnelmaschine besteht darin, dass der Bediener den Tunnel während des Vortriebs nicht betritt – die gesamte Lenkung, Überwachung und Maschinensteuerung erfolgt über eine Versorgungsleitung von einer Oberflächensteuerkabine aus. Dank dieser Fernsteuerungsfunktion eignet sich der Mikrotunnelbau für Bohrungen mit kleinem Durchmesser, bei denen der Zutritt für Arbeiter physisch unmöglich ist, und für alle Bodenverhältnisse, bei denen der Ortsvortrieb ein inakzeptables Sicherheitsrisiko darstellt. Bei Mikrotunnelmaschinen handelt es sich in den meisten Fällen um Schlammsysteme, deren hydraulischer Schneid- und Schlammtransport für eine kontinuierliche Ortsbrustunterstützung und eine effiziente Abtragung des Abraums in weichem und gemischtem Boden sorgt.
Erddruckausgleichsrohrvortriebsmaschinen
Erddruckausgleichs-Rohrvortriebsmaschinen (EPB) nutzen den ausgehobenen Boden selbst – konditioniert mit Wasser, Schaum oder Polymer, um eine bearbeitbare Plastizität zu erreichen – als primäres Ortsstützmedium. Ein Druckschott hinter dem Bohrkopf sorgt für einen kontrollierten Bodendruck gegen die Tunnelwand, wobei die Förderleistung des Schneckenförderers im Verhältnis zur Vortriebsrate ausgeglichen wird, um den Ortsdruck innerhalb eines Zielbereichs zu halten. EPB-Maschinen sind besonders effektiv in bindigen und gemischten Böden, wasserdurchtränkten Sanden und städtischen Umgebungen, in denen Bodensetzungen minimiert werden müssen. Sie verarbeiten ein breites Spektrum an Durchmessern von etwa 600 mm bis zu mehreren Metern und sind je nach Bohrungsgröße sowohl in ferngesteuerter als auch in bemannter Ausführung erhältlich.
Schlammschildrohrvortriebsmaschinen
Schlammschildmaschinen stützen die Tunnelwand mit unter Druck stehendem Bentonitschlamm ab und entfernen das Bohrgut hydraulisch über einen geschlossenen Schlammkreislauf. Sie eignen sich hervorragend für gesättigte körnige Böden – fließende Sande, Kies und durchlässige Schwemmlandablagerungen –, wo die EPB-Konditionierung schwierig ist und wo die Aufrechterhaltung des Flächendrucks entscheidend ist, um Ausbrüche oder Setzungen zu verhindern. Die an der Oberfläche erforderliche Schlammtrennanlage ist ein wichtiges logistisches Element bei Schlammprojekten: Sie nimmt eine beträchtliche Fläche ein, erfordert eine sorgfältige Verwaltung der Schlammmischungseigenschaften und erzeugt einen Abfallentsorgungsstrom aus filtergepresstem Schlammkuchen, der als Abfallmaterial entsorgt werden muss. Trotz dieser Komplexität sind Schlammschildmaschinen oft die einzig brauchbare Technologie für wasserführendes körniges Erdreich in großer Tiefe.
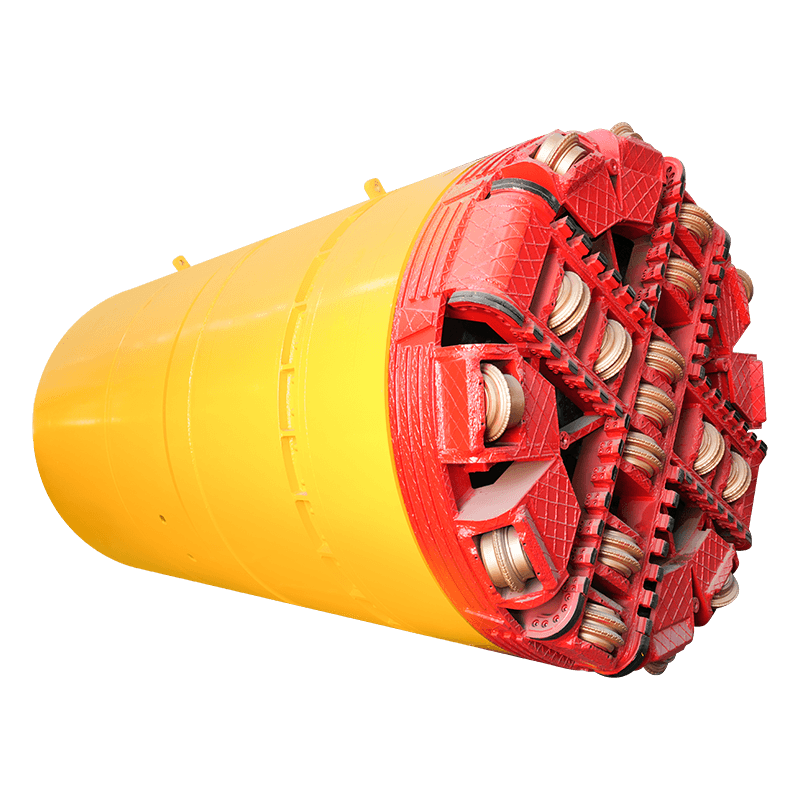
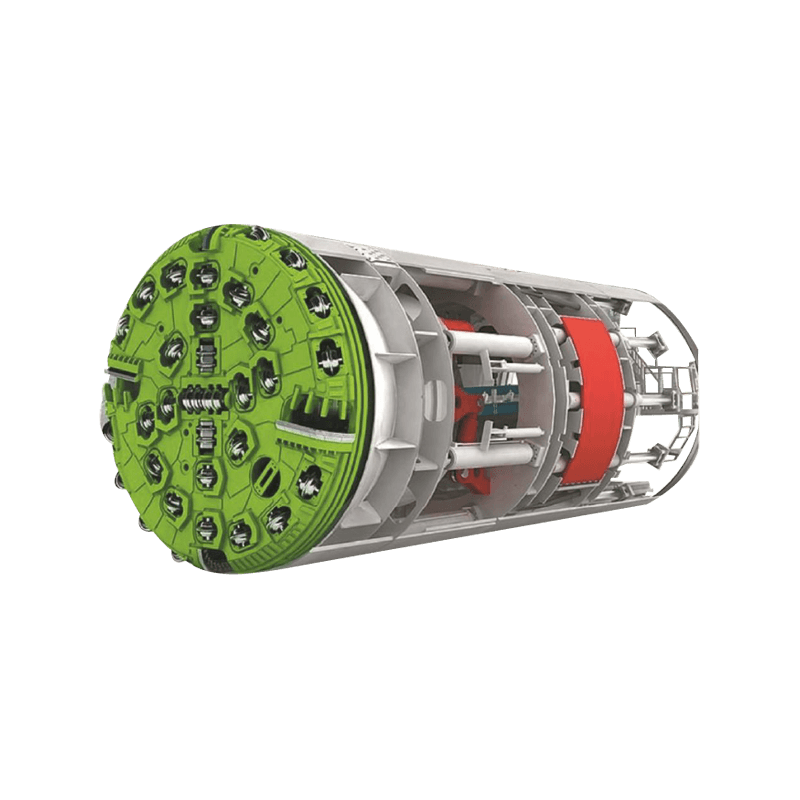
Gesteinsschneide-Rohrvortriebsmaschinen
In Felsformationen sind Standard-Bodenschneidköpfe wirkungslos und es sind spezielle Felsschneidemaschinen erforderlich. Diese Maschinen sind mit vollflächigen Scheibenschneideranordnungen ausgestattet – im Prinzip ähnlich einer TBM (Tunnelbohrmaschine) – die hohe Punktlasten auf die Felswand ausüben, um sie in Späne zu zerkleinern. Anschließend werden die Späne aus der Bohrung gespült bzw. gefördert. Felsvortriebsmaschinen müssen auf die Druckfestigkeit, Abrasivität und Brucheigenschaften der jeweiligen Gesteinsformation abgestimmt sein: Weiches Sedimentgestein wie Kreide oder Tonstein kann mit verstärkten Schleppmeißelköpfen bearbeitet werden, während hartes magmatisches oder metamorphes Gestein mit UCS-Werten über 100 MPa vollflächige Scheibenschneider in härteren Stahlsorten erfordert. Der Fräserverschleiß in abrasivem Gestein ist ein wesentlicher Kostenfaktor und muss von Anfang an in den Projektbudgets berücksichtigt werden.
Bodenbedingungen und ihr Einfluss auf die Maschinenauswahl
Kein einziger Rohrvortriebsmaschinentyp funktioniert bei allen Bodenbedingungen gut. Die geotechnische Untersuchung – Bohrlöcher, Probegruben, Laboruntersuchungen von Bodenproben und Überwachung des Grundwasserspiegels – ist die wesentliche Grundlage, auf der jede Maschinenauswahlentscheidung basieren muss. Die Auswahl der falschen Maschine für die jeweiligen Bodenverhältnisse ist eine der häufigsten Ursachen für das Scheitern von Rohrvortriebsprojekten und führt zu steckengebliebenen Maschinen, Platzern, übermäßigen Setzungen oder dem völligen Ausfall des Vortriebs.
Die folgende Tabelle fasst die allgemeine Beziehung zwischen Bodenbedingungen und geeigneten Rohrvortriebsmaschinentypen zusammen:
| Bodenbeschaffenheit | Grundwasser vorhanden | Empfohlener Maschinentyp | Wichtige Überlegung |
| Fester Ton / bindiger Boden | Niedrig / Keine | EPB oder offener Gesichtsschutz | Schneidkopf verstopft durch klebrigen Ton |
| Weicher Ton/Schluff | Mäßig | EPB mit Klimaanlage | Abwicklungsrisiko; Gesichtsdruckkontrolle kritisch |
| Gesättigter Sand/Kies | Hoch | Schlammschild MTBM | Gülleanlagenlogistik; Blowout-Prävention |
| Gemischter Boden (Erdbrocken) | Variabel | Schlamm oder EPB mit Gesteinsschneidefähigkeit | Umgang mit Felsbrocken; Fräserverschleiß |
| Weiches Gestein (Kreide, Tonstein) | Niedrig bis mittel | Felsfräskopf mit Schleppmeißeln | Bit-Verschleißrate; Schmierung an der Rohr-Erde-Schnittstelle |
| Hartgestein (Granit, Basalt) | Variabel | Vollflächige Scheibenfräsmaschine für Gestein | Hoch cutter wear cost; high thrust force requirement |
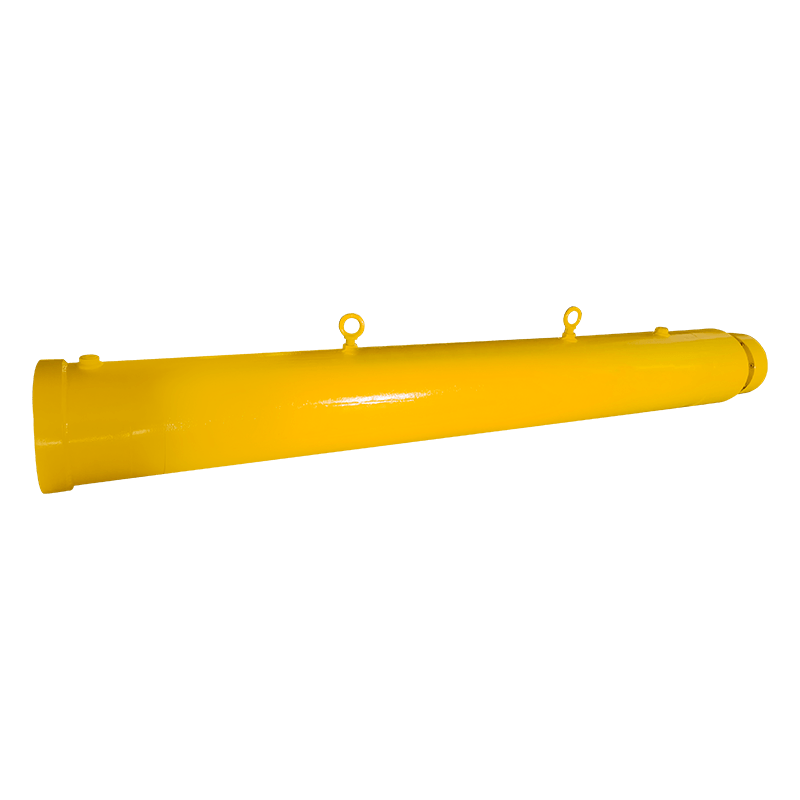
Verwalten der Vortriebskräfte und Verwendung von Zwischenvortriebsstationen
Wenn sich der Rohrstrang während eines Vortriebs verlängert, erhöht sich die auf die Außenfläche der Rohre wirkende Reibung und die zum Vortrieb des Systems erforderliche Gesamtvortriebskraft nimmt zunehmend zu. Bei kurzen Fahrten in günstigem Gelände ist dieser Aufbau allein mit der Kapazität des Hauptheberrahmens beherrschbar. Bei längeren Vortrieben – insbesondere solchen mit mehr als 100–150 Metern oder kürzeren Vortrieben in abrasivem oder reibungsreichem Boden – kann die angesammelte Mantelreibung die Schubkapazität des Hauptrahmens und die strukturelle Belastbarkeit der Rohrverbindungen übersteigen. Hier sind Zwischenheberstationen unerlässlich.
Eine Zwischenvortriebsstation (IJS) ist ein kurzer Stahlzylinder, der mit einem eigenen Satz Hydraulikzylinder ausgestattet ist und während des Vortriebs in vorgegebenen Abständen im Rohrstrang installiert wird. Wenn die Vortriebskraft ihre Grenze erreicht, werden die IJS-Rams aktiviert, um den vorderen Teil des Rohrstrangs unabhängig zu schieben, während die Hauptzylinder zurückgesetzt werden. Durch die Aufteilung des Rohrstrangs in Segmente und die sequenzielle Aktivierung der IJS-Einheiten wird die maximale Kraft, die auf jede einzelne Rohrverbindung ausgeübt wird, innerhalb sicherer struktureller Grenzen gehalten, und der Vortrieb kann weit über das hinausgehen, was der Hauptvortriebsrahmen allein erreichen könnte. Bei gut konzipierten Rohrvortriebsprojekten auf langen Vortrieben werden IJS-Positionen im Voraus auf der Grundlage berechneter Reibungslasten festgelegt, wobei zusätzliche Positionen im Voraus geplant werden, falls die Bodenbedingungen schlechter als erwartet sind.
Die Schmierung der Rohr-Boden-Schnittstelle mit Bentonitslupe oder Polymergel, das durch Öffnungen in der Rohrwand injiziert wird, ist die andere primäre Strategie zur Bewältigung der Vortriebskräfte. Ein wirksames Schmierprogramm kann die Reibung zwischen der Rohrwand und der Haut im Vergleich zu ungeschmierten Antrieben um 50–80 % reduzieren, wodurch die erreichbare Antriebslänge erheblich verlängert und die Anzahl der erforderlichen IJS-Einheiten reduziert wird. Die Schmierung muss während des gesamten Vortriebs kontinuierlich aufrechterhalten werden. Wenn sie zerfällt oder vom umgebenden Boden absorbiert wird, erhöht sich die Reibung schnell und kann dazu führen, dass der Rohrstrang stecken bleibt.
Rohrmaterialien, die beim Rohrvortrieb verwendet werden
Die von einer Rohrvortriebsmaschine durch das Erdreich geschobenen Rohrstücke müssen während ihrer gesamten Lebensdauer sowohl den entlang ihrer Achse übertragenen Vortriebskräften als auch den auf ihre Wände wirkenden äußeren Erd- und Grundwasserdrücken standhalten. Nicht alle Rohrmaterialien sind für den Vortrieb geeignet und die Wahl des Rohrtyps hat direkte Auswirkungen auf den Bohrdurchmesser, die Vortriebslänge, die zulässige Durchbiegung an Verbindungsstellen und die langfristige Leistung der Rohrleitung.
- Vortriebsrohr aus Stahlbeton: Das am häufigsten verwendete Material für den Kanalvortrieb mit mittleren bis großen Durchmessern (300 mm bis 3.000 mm und mehr). Betonvortriebsrohre werden nach spezifischen Vortriebsnormen hergestellt – EN 1916 in Europa, ASTM C76 in Nordamerika – mit Endringen aus gehärtetem Stahl an jeder Verbindungsfläche, um die Vortriebslasten gleichmäßig zu verteilen und die Spannungskonzentration in der Verbindung zu minimieren. Sie bieten eine hervorragende Langzeitbeständigkeit, chemische Beständigkeit gegenüber Abwassergasen und wettbewerbsfähige Kosten bei größeren Durchmessern.
- Steinzeugvortriebsrohr: Wird bei kleineren Kanaldurchmessern verwendet, typischerweise 150 mm bis 600 mm. Steinzeugton bietet eine außergewöhnliche Beständigkeit gegen chemische Angriffe durch aggressive Abwässer und Industrieabwässer und ist daher die erste Wahl für chemisch anspruchsvolle Abwasserumgebungen. Seine Sprödigkeit im Vergleich zu Beton erfordert eine sorgfältige Handhabung und begrenzt die aufbringbaren Vortriebskräfte.
- Stahlvortriebsrohr: Wird für Wasser- und Gasübertragungsleitungen, Ölpipelines und Mantelrohre mit größeren Durchmessern verwendet. Stahl bietet eine sehr hohe Druck- und Zugfestigkeit, was die Anwendung hoher Vortriebskräfte ermöglicht und ihn für lange Fahrten und harte Bodenverhältnisse geeignet macht. Äußerer Korrosionsschutz – schmelzgebundenes Epoxidharz, Polyurethanbeschichtung oder kathodischer Schutz – ist für eine lange Lebensdauer unerlässlich.
- Vortriebsrohr aus GFK (glasfaserverstärkter Kunststoff): Vereint hohe Festigkeit mit geringem Gewicht und ausgezeichneter Korrosionsbeständigkeit. GFK-Vortriebsrohre werden zunehmend für chemisch aggressive Umgebungen und für Vortriebe eingesetzt, bei denen ein geringeres Rohrgewicht die Handhabung in engen Startgruben vereinfacht. Sie erfordern eine sorgfältige Verbindungskonstruktion, um eine ausreichende Lastübertragung unter Vortriebskräften sicherzustellen.
- Polymerbeton und HOBAS-Rohr: Schleudergegossene Rohre aus glasfaserverstärktem Polymermörtel (CCFRPM) vereinen die chemische Beständigkeit von Polymer mit der für Vortriebsanwendungen erforderlichen Druckfestigkeit. Weit verbreitet in aggressiven Abwasser- und Industrieentwässerungsanwendungen in ganz Europa und zunehmend auch in anderen Märkten.
Wichtige Überlegungen zur Projektplanung vor der Mobilisierung einer Rohrvortriebsmaschine
Rohrvortriebsprojekte, bei denen vor Ort ernsthafte Probleme auftreten, sind selten unglücklich – sie sind fast immer das Ergebnis unzureichender Planung, unzureichender Bodenuntersuchungen oder unrealistischer Annahmen bei der Planung. Die folgenden Planungselemente verdienen sorgfältige Aufmerksamkeit, bevor eine Rohrvortriebsmaschine auf die Baustelle mobilisiert wird.
- Umfang und Qualität der geotechnischen Untersuchung: Die Bohrlöcher sollten in Abständen angebracht werden, die der Geländevariabilität des Standorts entsprechen – in der Regel nicht mehr als 50 Meter entlang der Vortriebslinie bei städtischen Projekten – und sich bis mindestens drei Rohrdurchmesser unter das Sohlenniveau der geplanten Bohrung erstrecken. Labortests sollten die Partikelgrößenverteilung, den Plastizitätsindex, die undrainierte Scherfestigkeit, die uneingeschränkte Druckfestigkeit von Gestein und die Grundwasserchemie umfassen, wenn Korrosion von Rohren oder Maschinenkomponenten ein Problem darstellt.
- Umfrage zu bestehenden Dienstleistungen: Bevor die Antriebsausrichtung abgeschlossen wird, muss eine vollständige Vermessung der Versorgungseinrichtung unter Verwendung von Bodenradar, elektromagnetischer Ortung und einer Überprüfung aller verfügbaren Aufzeichnungen der Versorgungseinrichtung durchgeführt werden. Wenn eine unentdeckte Versorgungsleitung eine aktive Bohrung kreuzt, kann dies katastrophale Folgen haben – Versorgungsstreiks an Gasleitungen, Hochspannungskabeln oder Wasserleitungen in der Nähe eines Stromvortriebs gehören zu den schwerwiegendsten Risiken beim grabenlosen Stadtbau.
- Design der Start- und Empfangsgrube: Die Startgrube muss groß genug sein, um den Hubrahmen, die Rohrtransportausrüstung und das Abraumentfernungssystem unterzubringen und der Besatzung einen sicheren Arbeitszugang zu bieten. Die Mindestmaße der Grube werden durch den Rohrdurchmesser, die Maschinenlänge und den Vortriebshub bestimmt. Die Grube muss ausreichend abgestützt und entwässert sein, und die hintere Druckwand muss strukturell in der Lage sein, der maximal zu erwartenden Vortriebskraft standzuhalten, ohne sich zu bewegen oder zu versagen.
- Antriebslänge und Krümmung: Jede Kombination aus Maschinentyp und Rohrmaterial hat eine maximal erreichbare Antriebslänge, jenseits derer die Vortriebskräfte oder Rohrverbindungsspannungen nicht mehr beherrschbar sind. Ebenso sind gekrümmte Ausrichtungen möglich, führen jedoch zu zusätzlicher Komplexität bei der Führung und erhöhen die Biegebelastungen der Rohrverbindungen. Vortriebe mit einer Länge von mehr als etwa 150 Metern oder mit horizontalen oder vertikalen Kurven sollten vor der endgültigen Auswahl der Maschine von einem auf Grabenarbeiten spezialisierten Ingenieur beurteilt werden.
- Siedlungsüberwachung und Risikobewertung: Für Fahrten unter empfindlichen Bauwerken – Eisenbahnschienen, historischen Gebäuden, Brückenwiderlagern oder in Betrieb befindlichen Industrieanlagen – sollte vor Beginn der Fahrt ein Setzungsüberwachungsprogramm mit Oberflächenvermessungsdenkmälern, präziser Nivellierung und Neigungsmessern an empfindlichen Bauwerken erstellt werden. Auslöse- und Aktionsebenen für die Anpassung von Maschinenparametern oder die Unterbrechung des Antriebs sollten im Voraus mit den Eigentümern der betroffenen Infrastruktur vereinbart werden.
Häufige Probleme beim Rohrvortrieb und wie erfahrene Auftragnehmer damit umgehen
Selbst gut geplante Rohrvortriebsvortriebe stoßen auf Probleme. Die Bodenbedingungen stimmen selten genau mit den Bohrdaten überein, Maschinenkomponenten verschleißen oder versagen und unerwartete Hindernisse sind beim städtischen Untergrundbau eine Realität. Der Unterschied zwischen einem Projekt, das sich von diesen Ereignissen erholt, und einem Projekt, das zu einer steckengebliebenen Maschine oder einem Antriebsabbruch führt, hängt in der Regel von der Erfahrung der Mannschaft und den im Projektplan integrierten Notfallmaßnahmen ab.
Hindernisse an der Tunnelbrust
Felsbrocken, Pflastersteine, alte Mauerwerksfundamente, Holzpfähle und stillgelegte Versorgungsleitungen gehören zu den häufigsten unerwarteten Hindernissen, die bei Rohrvortriebsarbeiten in städtischen Gebieten auftreten. Bei Vortrieben mit bemanntem Eintrittsdurchmesser können Arbeiter manchmal Hindernisse mit Handwerkzeugen oder pneumatischen Brechern unter dem Schutz des Schildes beseitigen. Bei kleineren Mikrotunneldurchmessern, bei denen kein Zugang möglich ist, umfassen Notfalloptionen einen interventionellen Zugang über einen Ausbruchsaushub oberhalb des Vortriebs, oberflächengebohrtes Jet-Injection oder Harzinjektion zur Stabilisierung des Bodens um das Hindernis herum oder in extremen Fällen das Aufgeben des Vortriebs und die Bergung der Maschine aus einer neuen Grube vor der Verstopfung.
Übermäßiger Aufbau der Vortriebskraft
Wenn die Vortriebskräfte schneller als erwartet ansteigen, sollte die erste Reaktion immer darin bestehen, das Schmierprogramm zu bewerten und zu optimieren – indem Sie das Einspritzvolumen und die Häufigkeit erhöhen, prüfen, ob die Schmieröffnungen nicht blockiert sind, und sicherstellen, dass der ringförmige Hohlraum um die Rohre ausreichend gefüllt ist. Wenn die Optimierung der Schmierung den Kraftanstieg nicht aufhalten kann, ist die frühere Aktivierung der Zwischenhubstationen als geplant der nächste Schritt. Das Erzwingen eines steckengebliebenen Antriebs durch Aufbringen maximaler Schubkraft ist selten produktiv und birgt die Gefahr einer Beschädigung der Rohrverbindung, eines Ausfalls von Maschinenkomponenten oder einer Abhebung der Oberfläche. Eine Unterbrechung des Vortriebs und eine leichte Entspannung des Bodens rund um den Rohrstrang – kombiniert mit einer verstärkten Schmierung – führen oft zu größeren Fortschritten als eine fortgesetzte Forcierung.
Offline-Abweichung
Frühzeitig erkannte Führungsabweichungen sind beherrschbar – die Lenkzylinder können die Richtung der Maschine über die nächsten Rohrlängen schrittweise korrigieren, ohne dass unzulässige Gelenkwinkel entstehen. Abweichungen, die unentdeckt bleiben, bis sie groß sind, lassen sich viel schwieriger beheben und können zu Rohrverbindungsspannungen, Oberflächensetzungen an einer nicht vorgesehenen Stelle oder potenziellen Konflikten mit bestehenden Diensten führen. Der beste Schutz vor Abweichungsproblemen ist ein strenges Überwachungssystem – das Lesen und Aufzeichnen der Führungszielposition nach jeder Rohrinstallation, nicht nur zu Beginn jeder Schicht – und ein klares Aktionsprotokoll dafür, welche Lenkkorrekturen bei welcher Abweichungsgröße angewendet werden.







