


Was eine Schneckenbohrmaschine leistet und wo sie eingesetzt wird
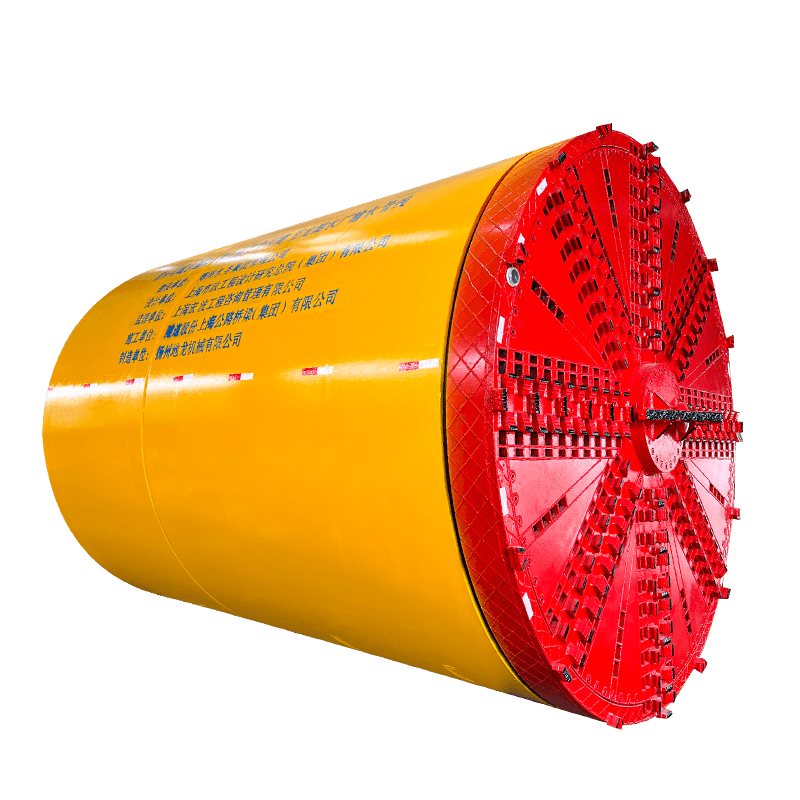
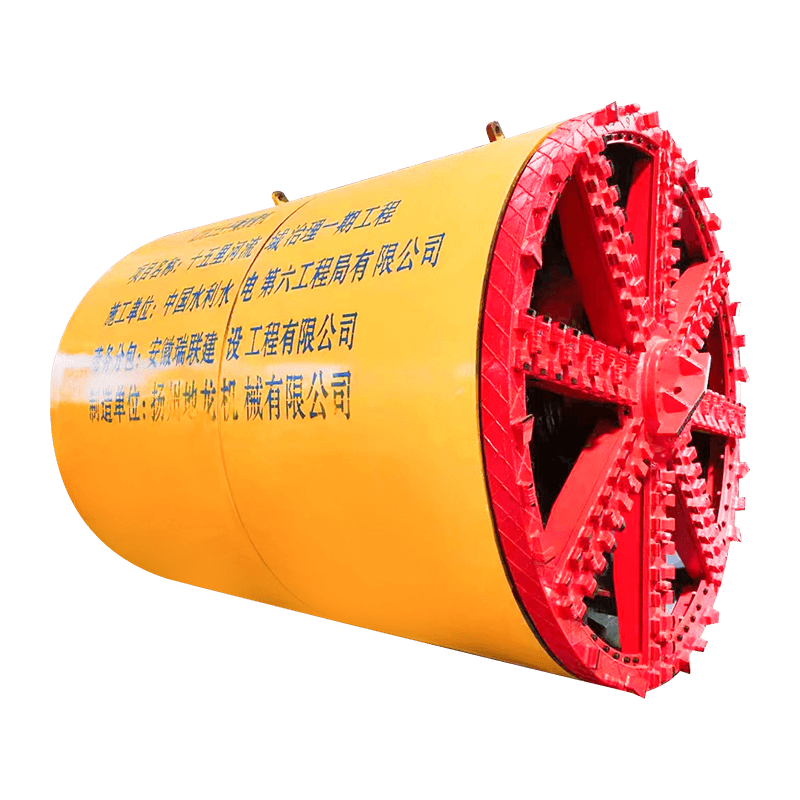
Eine Schneckenbohrmaschine ist ein grabenloses Baugerät, mit dem Stahlmantelrohre horizontal durch den Boden verlegt werden können, ohne dass entlang der gesamten Verlegestrecke ein offener Graben ausgehoben werden muss. Die Maschine befindet sich in einer Startgrube und treibt eine rotierende Spiralschnecke – eine spiralförmige Welle – vorwärts durch den Boden, während sie gleichzeitig ein Stahlmantelrohr hinter sich herschiebt. Die rotierende Schnecke schneidet und verdrängt den Boden an der Ortsbrust und transportiert das ausgehobene Material zurück durch das Innere des Gehäuses zur Startgrube, wo es gesammelt und entfernt wird. Das Ergebnis ist ein installiertes Mantelrohr, das unter einer Straße, Eisenbahn, Wasserstraße oder einem anderen Oberflächenhindernis verläuft, ohne die darüber liegende Oberfläche zu beeinträchtigen.
Das Schneckenbohren ist eine der am weitesten verbreiteten grabenlosen Verlegemethoden im Versorgungsbau. Dies ist der Standardansatz für die Installation von Wasserleitungen, Gasleitungen, Stromleitungen und Telekommunikationskanälen unter Straßenkreuzungen, Bahnstrecken und umweltsensiblen Bereichen, in denen offene Ausgrabungen nicht zulässig oder zu teuer sind. Die Methode wird wegen ihrer relativen Einfachheit, mechanischen Zuverlässigkeit und Kosteneffizienz bei einem breiten Spektrum von Bodenbedingungen im Vergleich zu komplexeren grabenlosen Technologien wie Mikrotunnelbau oder horizontalem Richtbohren geschätzt.
Funktionsweise einer Schneckenbohrmaschine: Die grundlegende Mechanik
Das Funktionsprinzip eines Schneckenbohrmaschine ist einfach, aber wenn man es im Detail versteht, kann man besser verstehen, was die Maschine gut kann und wo ihre Grenzen liegen. Der Prozess beginnt in einer Startgrube, die so tief ausgehoben wird, dass die Bohrmaschine auf der richtigen Höhe für die geplante Installation platziert wird. Die Maschine wird auf Stahlschienen positioniert, die mithilfe von Laserführung oder optischen Vermessungsgeräten präzise auf die erforderliche Bohrrichtung und das erforderliche Gefälle ausgerichtet sind.
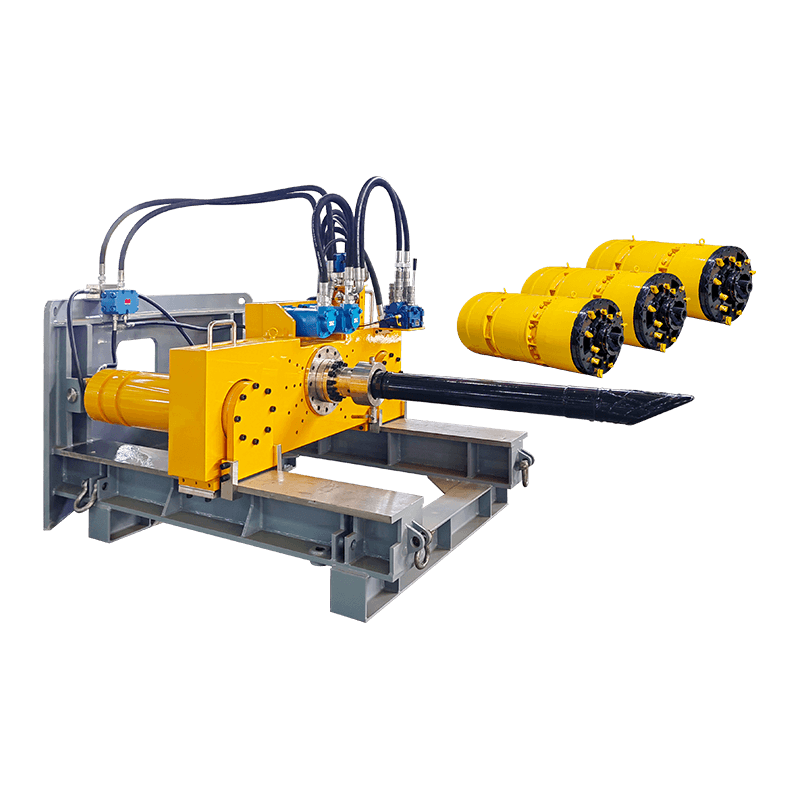
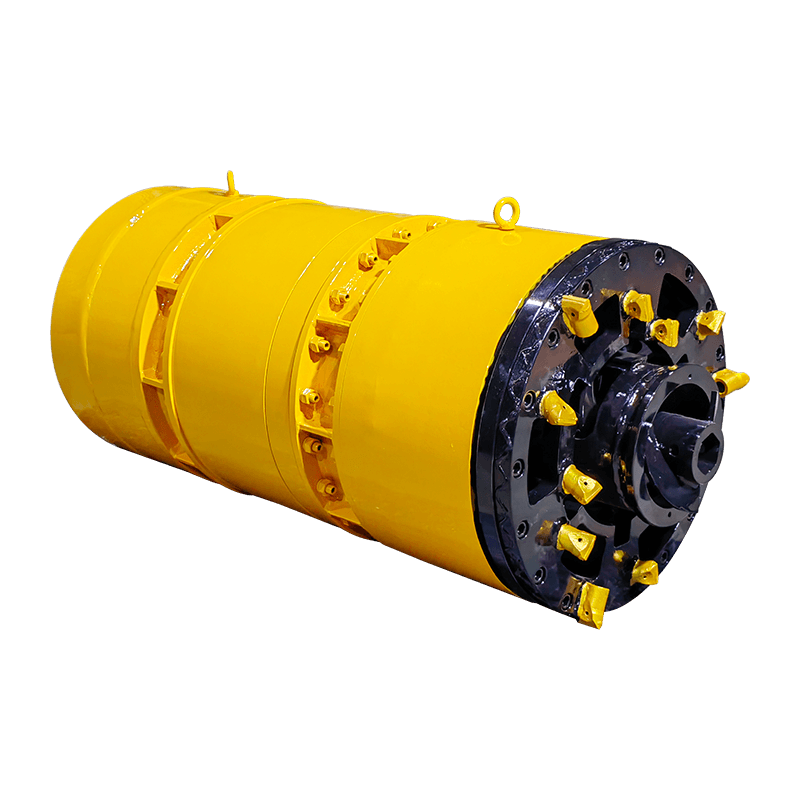
Die Antriebseinheit der Maschine – typischerweise ein Elektromotor oder ein hydraulisches Antriebssystem – dreht den Schneckenstrang über ein Antriebsfutter, während ein hydraulisches Schubsystem die gesamte Schnecken- und Gehäusebaugruppe nach vorne in den Boden drückt. Der Schneidkopf an der Vorderseite des Schneckenstrangs bricht und lockert den Boden, und die spiralförmigen Flügel der rotierenden Schnecke befördern das Bohrklein nach hinten durch das Bohrloch und zurück in die Startgrube. Während die Bohrung voranschreitet, wird das Stahlmantelrohr abschnittsweise an die Rückseite des Vorrohrs geschweißt, wodurch der Futterrohrstrang schrittweise aufgebaut wird, bis die Bohrmaschine und die Bohrschnecke in der Aufnahmegrube am anderen Ende der Kreuzung auftauchen.
Sobald die Bohrung abgeschlossen ist, wird der Bohrstrang aus dem Futterrohr herausgezogen und das Stahlmantelrohr verbleibt dauerhaft im Boden. Das Mediumrohr – das eigentliche Versorgungsrohr, das das Produkt transportiert – wird dann durch die Gehäusebohrung installiert. Die Ummantelung fungiert als Schutzrohr für das Trägerrohr und bietet strukturelle Unterstützung gegen Boden- und Oberflächenlasten über der Kreuzung. Dieses Zweirohrsystem ist ein charakteristisches Merkmal der Schneckenbohrungskonstruktion, das sie von Methoden unterscheidet, bei denen das Produktrohr direkt ohne Gehäuse installiert wird.
Arten von Schneckenbohrmaschinen
Schneckenbohrmaschinen werden in verschiedenen Größen und Konfigurationen hergestellt, die für unterschiedliche Installationsdurchmesser, Bodenbedingungen und Projektanforderungen geeignet sind. Das Verständnis der Hauptkategorien hilft dabei, die Ausrüstung den spezifischen Anforderungen eines Projekts anzupassen.
Konventionelle Schneckenbohrmaschinen
Herkömmliche Erdbohrmaschinen – manchmal auch schienenmontierte oder fahrgestellmontierte Einheiten genannt – sind die Standardkonfiguration für die meisten Straßen- und Versorgungskreuzungsprojekte. Die Maschine sitzt auf einem Stahlkettenrahmen in der Startgrube und nutzt einen Drehantriebskopf und hydraulische Schubzylinder, um die Schnecke und das Gehäuse gleichzeitig voranzutreiben. Diese Maschinen sind in Größen erhältlich, die Gehäusedurchmesser von etwa 100 mm bis 1500 mm oder größer abdecken, mit Schubkapazitäten von 50 Tonnen für Maschinen mit kleinem Durchmesser bis 500 Tonnen oder mehr für Anlagen mit großem Durchmesser. Die Geschwindigkeit und das Drehmoment des Antriebskopfs sind auf den Gehäusedurchmesser und die Bodenbeschaffenheit abgestimmt. Die meisten Maschinen bieten eine variable Geschwindigkeitsregelung, um die Schnittleistung bei unterschiedlichen Bodenarten zu optimieren.
Pilotrohrschneckenbohrsysteme
Beim Bohren mit Pilotrohrschnecken handelt es sich um eine verbesserte Version des konventionellen Schneckenbohrens, bei der vor der Schneckenbohrung mit vollem Durchmesser eine steuerbare Installationsphase für das Pilotrohr hinzugefügt wird. Ein Pilotrohr mit kleinem Durchmesser wird zunächst mithilfe eines Theodoliten oder eines Kameraführungssystems zur Aufnahmegrube gelenkt, um einen präzise ausgerichteten Pilotpfad festzulegen. Die Schneckenbohrmaschine folgt dann der Ausrichtung des Pilotrohrs, um das Mantelrohr in der richtigen Position und Neigung zu installieren. Mit diesem Ansatz werden deutlich engere Installationstoleranzen erreicht – typischerweise innerhalb von ±25 mm der geplanten Ausrichtung – im Vergleich zum herkömmlichen Schneckenbohren, was ihn für Anwendungen geeignet macht, die eine präzise Kontrolle des Gefälles erfordern, wie z. B. Schwerkraftkanalinstallationen und Kreuzungen mit engen Abstandsanforderungen unter bestehenden Versorgungsleitungen.
Roboter-Schneckenbohrmaschinen
Roboter- oder ferngesteuerte Schneckenbohrmaschinen sind für Installationen in engen Räumen, gefährlichen Umgebungen oder an Orten konzipiert, an denen die Anwesenheit des Bedieners in der Grube eingeschränkt ist. Diese Maschinen werden von der Oberfläche aus über eine Fernkonsole gesteuert und verfügen über Kamerasysteme und elektronische Überwachung, damit der Bediener die Bohrung verwalten kann, ohne sich in der Startgrube aufhalten zu müssen. Roboter-Schneckenbohrgeräte sind besonders relevant für Kreuzungen in umweltsensiblen Gebieten, kontaminiertem Boden oder Projekten mit eingeschränktem Zugang, die einen herkömmlichen bemannten Grubenbetrieb verhindern.
Kompakte und auf Rahmen montierte Maschinen
Kompakte, auf einem Schlitten montierte Schneckenbohrmaschinen sind für Installationen mit kleinerem Durchmesser – typischerweise 100 mm bis 600 mm Gehäusedurchmesser – in begrenzten städtischen Umgebungen konzipiert, in denen Grubengröße und Zugangsbeschränkungen den Einsatz von Geräten voller Größe einschränken. Diese Maschinen haben eine kleinere Stellfläche als herkömmliche kettenmontierte Einheiten, erfordern flachere Startgruben und können schneller zwischen Standorten bewegt und aufgebaut werden. Sie werden häufig für Versorgungsanschlüsse, Kreuzungen von Telekommunikationsleitungen und kleinere Wasser- und Gashauptinstallationen unter städtischen Straßen verwendet, wo Ausgrabungen störend sind und der Zugang begrenzt ist.
Bodenbedingungen: Wo Schneckenbohren funktioniert und wo nicht
Die Bodenbeschaffenheit ist der entscheidende Faktor bei der Entscheidung, ob das Schneckenbohren die geeignete Methode für eine bestimmte Kreuzung ist und welche spezielle Ausrüstung und Schneidkopfkonfiguration erforderlich ist. Das Schneckenbohren funktioniert bei einer Vielzahl von Bodentypen gut, weist jedoch bestimmte Einschränkungen auf, die bei der Projektplanung sorgfältig geprüft werden müssen.
| Bodentyp | Eignung | Typischer Schneidkopf | Wichtige Überlegungen |
| Kohäsiver Ton | Ausgezeichnet | Tonbohrer/Geschosskopf | Klebrige Böden erfordern möglicherweise eine Abraumbewirtschaftung; gute Bohrungsstabilität |
| Sandiger Boden | Gut | Sandschnecke/Schneidkopf | Bei trockenem kohäsionslosem Sand besteht die Gefahr des Einsturzes der Ortsbrust; Wasserzuflussmanagement erforderlich |
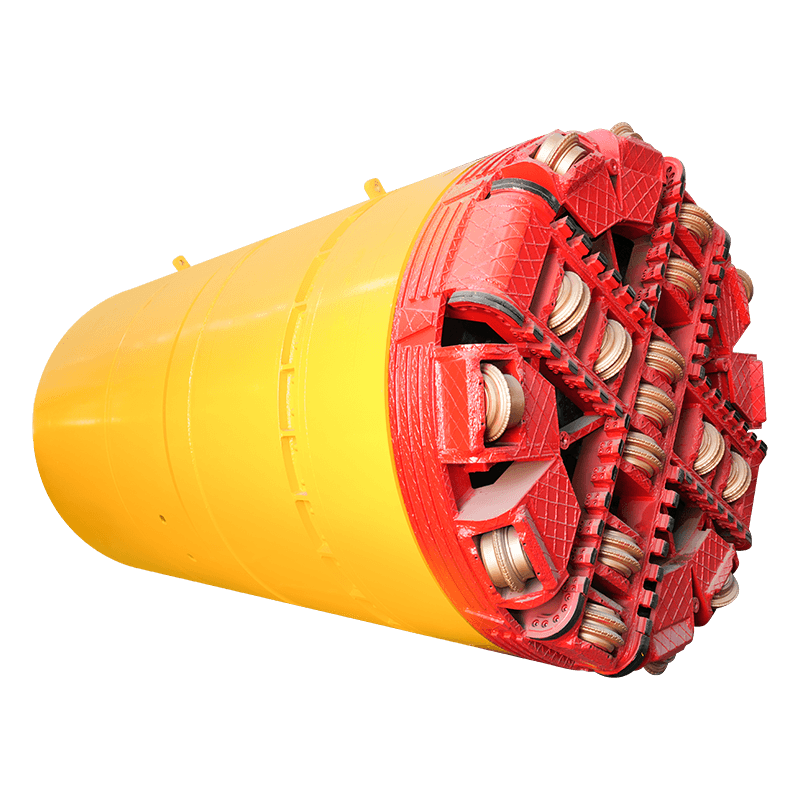
| Kies und Kopfsteinpflaster | Mäßig | Felsbohrer/Wolframkarbidspitzen | Kopfsteinpflaster kann zu Abweichungen führen; Möglicherweise ist eine übergroße Schnecke erforderlich |
| Weiches Gestein / verwittertes Gestein | Mäßig | Felsbohrer mit Hartmetalleinsätzen | Hoher Drehmomentbedarf; Der Verschleiß an Schnecke und Schneidkopf nimmt erheblich zu |
| Harter Rock | Schlecht bis ungeeignet | Wird normalerweise nicht verwendet | Drehmoment- und Schubanforderungen überschreiten typischerweise die praktischen Maschinengrenzen; Alternative Methoden bevorzugt |
| Mischwand (Boden und Fels) | Anspruchsvoll | Kombinierter Fels-/Bodenkopf | Variables Drehmoment und Schub; erhöhtes Abweichungsrisiko; engmaschige Überwachung erforderlich |
| Gesättigter loser Sand (unterhalb des Grundwasserspiegels) | Schwierig | Versiegelter Schneidkopf mit Druckkontrolle | Möglicherweise ist eine Bodenentwässerung oder ein Verguss erforderlich. erhebliches Risiko einer Gesichtsinstabilität |
Die häufigste Fehlerursache beim Schneckenbohren ist eine Abweichung von der geplanten Ausrichtung – das Bohrloch weicht aufgrund von Bodenschwankungen, Hindernissen oder einer unzureichenden Maschineneinstellung von der Linie oder dem Gefälle ab. Bindige Böden mit gleichbleibenden Eigenschaften sind hinsichtlich der Beibehaltung der Bohrrichtung am tolerantesten. Körnige Böden, gemischte Oberflächenbedingungen und alle Böden, die Felsbrocken oder Geröll enthalten, erhöhen das Abweichungsrisiko erheblich und erfordern eine strengere Ausrichtungsüberwachung im gesamten Bohrloch.
Schnecken- und Gehäusespezifikationen: Was Sie vor der Bestellung verstehen sollten
Die Schnecken- und Gehäusespezifikationen sind die technischen Parameter, die definieren, was eine Schneckenbohrmaschine installieren kann und wie sie unter bestimmten Bodenbedingungen funktioniert. Die richtigen Spezifikationen sind von entscheidender Bedeutung für eine erfolgreiche Installation – zu kleine Schnecken verfügen nicht über die Drehmomentkapazität für die Bodenbedingungen und ein Gehäuse, das nicht auf die Schubkapazität der Maschine abgestimmt ist, wird dazu führen, dass die Bohrung vor der Fertigstellung verbeult oder blockiert.
Design und Durchmesser des Schneckenflügels
Die Schneckenflügel – die spiralförmigen Flügel, die um die zentrale Welle gewickelt sind – müssen so dimensioniert sein, dass sie innerhalb des Gehäusedurchmessers verlaufen und ausreichend Spiel haben, um das Schnittgut ohne Blockierung nach hinten zu befördern. Der Außendurchmesser der Standardschnecke ist typischerweise 10–25 mm kleiner als der Nenninnendurchmesser des Gehäuses und bietet so einen ringförmigen Raum für den Bohrkleintransport. Die Flugsteigung – der Abstand zwischen aufeinanderfolgenden Spiralwindungen – beeinflusst, wie effizient das Schnittgut entlang der Schnecke bewegt wird. Eine engere Tonhöhe ist in lockeren, fließenden Böden effektiver; Eine breitere Steigung bewältigt klebrige bindige Böden besser, da die Tendenz verringert wird, dass sich Ton in den Windungen festsetzt und Verstopfungen verursacht.
Drehmomentkapazität der Schneckenwelle
Die Schneckenwelle muss in der Lage sein, das erforderliche Drehmoment zu übertragen, um den Boden zu schneiden und das Bohrgut zurück zur Startgrube zu transportieren, ohne sich zu verdrehen oder zu versagen. Der Drehmomentbedarf steigt mit dem Bohrdurchmesser, der Bodenfestigkeit, der Futterrohrlänge und der Tiefe der Bodenbedeckung über der Bohrung. Bei langen Bohrungen in steifen Böden kann der kumulative Drehmomentbedarf an der Schneckenwelle – der sowohl den Schnittwiderstand an der Stirnfläche als auch die Reibung des Bohrguts über die gesamte Länge der Bohrung überwinden muss – sehr hoch sein. Hersteller von Schneckenbohrmaschinen veröffentlichen Drehmomentwerte für ihre Geräte unter bestimmten Bodenbedingungen. Diese sollten mit einer geotechnischen Bewertung des erwarteten Drehmomentbedarfs verglichen werden, bevor die Geräteauswahl endgültig getroffen wird.
Gehäusewandstärke und -qualität
Stahlmantelrohre für Bohrschneckeninstallationen müssen eine ausreichende Wandstärke aufweisen, um der von der Bohrmaschine ausgeübten Druckkraft standzuhalten, ohne zu knicken, und eine ausreichende strukturelle Kapazität, um die nach der Installation einwirkenden Boden- und Oberflächenlasten zu tragen. Die Mindestwandstärke für Schneckenbohrungsgehäuse wird in der Regel durch die Anforderungen an den Installationsschub bestimmt, wobei üblicherweise API 5L oder gleichwertige Baustahlsorten spezifiziert werden. Für Kreuzungen unter starker Straßen- oder Schienenbelastung sind zusätzliche Wandstärkenberechnungen auf der Grundlage der Dauerbetriebslastbedingungen erforderlich. Gehäuseverbindungen werden in der Regel während der Installation in der Grube stumpfgeschweißt, und die Schweißqualität wirkt sich direkt auf die strukturelle Integrität des fertigen Gehäusestrangs sowohl unter Installations- als auch unter Betriebslasten aus.
Anforderungen und Einrichtung der Startgrube
Die Startgrube ist die Arbeitsplattform, von der aus die Schneckenbohrmaschine betrieben wird, und ihre Gestaltung und Konstruktion sind für den Erfolg der Installation ebenso wichtig wie die Maschine selbst. Eine unzureichend dimensionierte oder schlecht gebaute Startgrube ist eine der häufigsten Ursachen für Probleme beim Bau einer Schneckenbohrung – eine instabile Grubenwand kann einstürzen und die Bohrung blockieren, und eine zu kurze Grube verhindert die volle Ausnutzung des Maschinenhubs, was die Installationseffizienz verringert.
- Grubenlänge: Die Startgrube muss lang genug sein, um die Länge der Bohrmaschine plus die Länge eines Mantelrohrabschnitts plus Arbeitsraum für Bediener und Ausrüstung aufzunehmen. Eine Mindestgrubenlänge der Maschinenlänge plus dem 1,5- bis 2-fachen der Mantelrohrverbindungslänge ist die allgemeine Planungsregel, obwohl spezifische Maschinenanforderungen und Mantellängen variieren. Längere Gruben ermöglichen einen effizienteren Betrieb, indem jeder Schubhub maximiert wird, bevor angehalten wird, um einen neuen Gehäuseabschnitt hinzuzufügen.
- Grubenbreite: Die Breite der Grube muss es ermöglichen, dass die Maschine auf dem Raupenrahmen positioniert werden kann und auf jeder Seite ausreichend Freiraum für den Zugang und Betrieb vorhanden ist. Normalerweise ist auf jeder Seite des Maschinenrahmens ein Mindestarbeitsfreiraum von 600 mm erforderlich, wobei für die Handhabung des Futterrohrs, die Beseitigung von Abraum und die Einhaltung von Sicherheitsvorschriften zusätzliche Breite erforderlich ist. Die Grube sollte außerdem breit genug sein, um den Arbeitern im Falle von Bodenbewegungen oder Geräteausfällen einen Notausstieg zu ermöglichen.
- Grubentiefe und Maschinenhöhe: Die Grubentiefe wird durch die erforderliche Einbautiefe der Gehäusemittellinie bestimmt. Die Maschine muss auf der Höhe positioniert werden, die der Bohrung die richtige Tiefe und Neigung verleiht, wobei die Höhe der Maschine über dem Grubenboden berücksichtigt werden muss. Die genaue Höheneinstellung der Maschine auf ihrem Startrahmen ist von entscheidender Bedeutung – jeder Fehler in der Maschinenhöhe führt direkt zu einem Fehler in der endgültigen Einbautiefe, der nach Beginn des Bohrens nicht mehr korrigiert werden kann.
- Grubenunterstützung und Verbau: Startgruben müssen abgestützt oder abgestützt werden, um ein Einsturz der Wand während des Maschinenbetriebs zu verhindern. Die von der Bohrmaschine erzeugten Vibrationen schaffen in Kombination mit der zusätzlichen Belastung durch das Maschinengewicht an der Grubenwand Bedingungen, die selbst in stabilem Boden zu einer Destabilisierung von freitragenden Aushubarbeiten führen können. Stahlspundwände, Grabenkästen oder technischer Holzverbau sind die Standardstützmethoden, und die Konstruktion des Verbaus muss die Reaktionskraft berücksichtigen, die durch das Schubsystem der Bohrmaschine erzeugt wird, das gegen die Grubenkopfwand drückt.
- Druckwandkonstruktion: Die hydraulischen Schubzylinder der Bohrmaschine drücken gegen eine Schubwand an der Rückseite der Startgrube – typischerweise eine Stahlbetonkonstruktion oder ein Stahlplattenlagersystem, das die Schubkraft auf den umgebenden Boden verteilen soll. Die Druckwand muss in der Lage sein, der vollen Nennschubkapazität der Bohrmaschine ohne Bewegung oder Ausfall standzuhalten. Jede Bewegung der Druckwand während des Bohrens führt dazu, dass die Maschine ihre Ausrichtung verlässt, was möglicherweise zu einer Bohrungsabweichung führt, die nicht korrigiert werden kann.
Ausrichtungskontrolle und Genauigkeit beim Schneckenbohren
Die Aufrechterhaltung der geplanten horizontalen und vertikalen Ausrichtung im gesamten Bohrloch einer Schnecke ist eine der wichtigsten technischen Herausforderungen dieser Methode. Im Gegensatz zu steuerbaren grabenlosen Methoden wie horizontalem Richtbohren oder Mikrotunnelbau verfügt das konventionelle Schneckenbohren über keinen aktiven Lenkmechanismus – sobald die Bohrung beginnt, kann eine etwaige Abweichung von der geplanten Linie und dem geplanten Gefälle während der Bohrung nicht mehr korrigiert werden. Dies macht die Genauigkeit der Einrichtung vor dem Bohren und die Echtzeitüberwachung während des Bohrens entscheidend für das Erreichen einer akzeptablen Installation.
Die Maschinenausrichtung wird vor Beginn des Bohrens mithilfe eines Lasernivelliergeräts oder eines optischen Vermessungsinstruments eingestellt, das in der Startgrube positioniert wird. Der Laserstrahl definiert die geplante Mittellinie der Bohrung und der Antriebskopf der Maschine wird mithilfe verstellbarer Stützböcke am Kettenrahmen darauf ausgerichtet. Die Genauigkeit dieser Ersteinrichtung bestimmt direkt die erreichbare Installationstoleranz – eine gut eingestellte Maschine kann bei guten Bodenbedingungen eine horizontale und vertikale Genauigkeit von ±50 mm über typische Straßenüberquerungslängen von 20–40 Metern mit herkömmlicher Bohrausrüstung und innerhalb von ±25 mm mit Führungsrohrführungssystemen erreichen.
Während des Bohrens wird die Ausrichtung überwacht, indem die Position des Schneidkopfes oder des führenden Mantelrohrs mithilfe eines Kamerasystems, Vermessungsinstrumenten oder eines im Bohrloch montierten Ziels verfolgt und durch einen Durchgang beobachtet wird. Jede erkannte Abweichung sollte eine Überprüfung der möglichen Ursachen (Bodenvariabilität, Hindernisse, Maschinenvibrationseffekte) auslösen, bevor fortgefahren wird. Bei den meisten konventionellen Schneckenbohranwendungen gibt es nur begrenzte Möglichkeiten, einmal aufgetretene Abweichungen zu korrigieren, weshalb eine frühzeitige Erkennung und die Entscheidung, die Bohrung aufzugeben und neu zu konstruieren, bevor sich übermäßige Abweichungen anhäufen, oft kosteneffektiver ist als die Fortsetzung einer Bohrung, die bereits erheblich von der Toleranz abgewichen ist.
Vergleich des Schneckenbohrens mit anderen grabenlosen Methoden
Das Schneckenbohren ist eine von mehreren grabenlosen Installationsmethoden für Versorgungskreuzungen. Die Wahl zwischen den Methoden hängt von Faktoren wie Installationsdurchmesser, Kreuzungslänge, Bodenbedingungen, Genauigkeitsanforderungen und Projektbudget ab. Wenn Sie verstehen, wie sich das Bohren mit Schneckenbohrern im Vergleich zu den Hauptalternativen verhält, können Sie bei der Projektplanung eine fundierte Methodenauswahl treffen.
- Schneckenbohren vs. Horizontalrichtungsbohren (HDD): HDD verwendet einen lenkbaren Bohrstrang und einen flüssigkeitsunterstützten Aushub, um Rohre entlang eines gekrümmten Profils zu installieren, wodurch sowohl horizontale als auch vertikale Kurven im Installationspfad möglich sind. HDD ist hinsichtlich der Einbaugeometrie flexibler und kann größere Kreuzungslängen erreichen als das Schneckenbohren. HDD erfordert jedoch speziellere Ausrüstung und Fachwissen, ist bei kohäsiven Tonen, die nicht gut mit der Bohrflüssigkeit interagieren, weniger effektiv und erfordert keine Stahlummantelung – das Produktrohr wird direkt gezogen. Bei kürzeren, geraden Kreuzungen in bindigem Boden, bei denen die Stahlverrohrung aufgrund der Konstruktion oder Spezifikation erforderlich ist, ist das Schneckenbohren im Allgemeinen kostengünstiger.
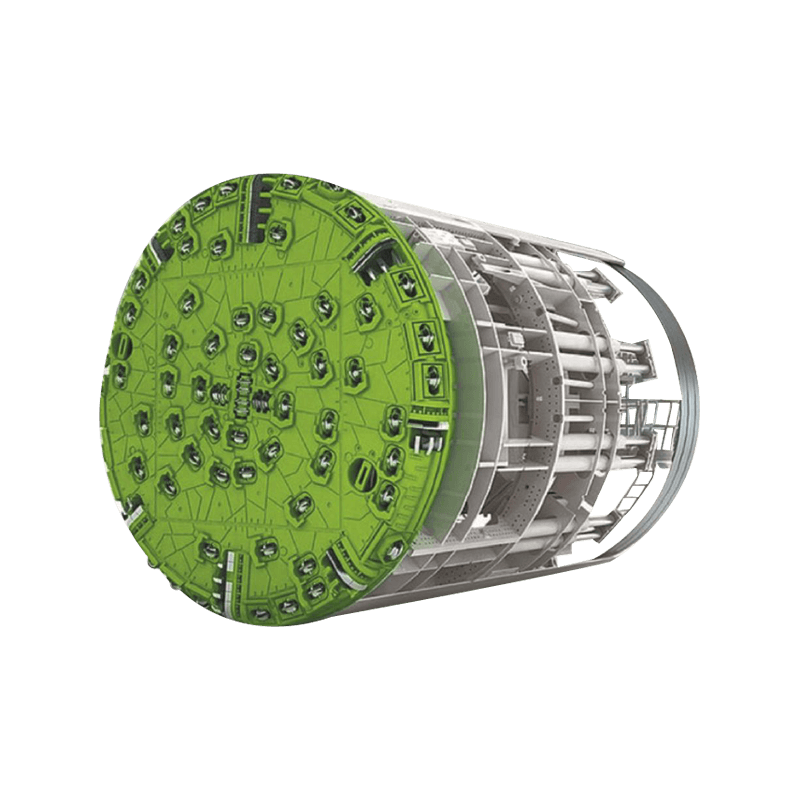
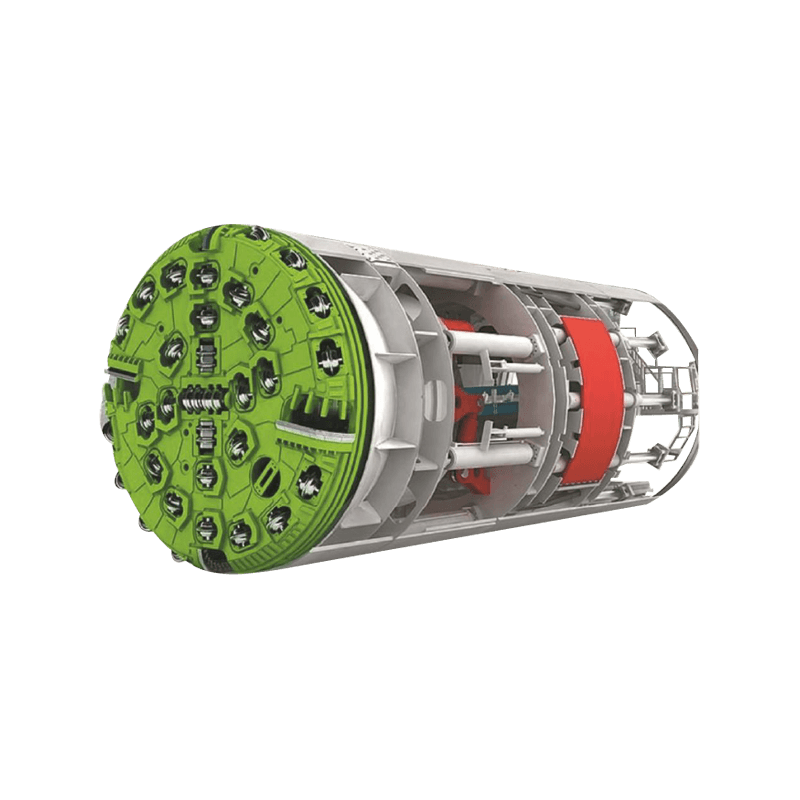
- Schneckenbohren vs. Mikrotunnelbau: Beim Mikrotunnelbau wird eine ferngesteuerte Tunnelvortriebsmaschine mit aktiver Lenkfunktion, kontinuierlicher Abraumentfernung über eine Schlammleitung und Echtzeit-Positionsüberwachung verwendet, um Rohre mit sehr hohen Ausrichtungstoleranzen zu verlegen – typischerweise ±10–25 mm. Es eignet sich für Installationen mit großem Durchmesser, lange Kreuzungen und Anwendungen, die eine präzise Höhenkontrolle erfordern, wie z. B. Schwerkraftkanalisationsinstallationen. Der Nachteil besteht darin, dass die Ausrüstungskosten und die Betriebskomplexität im Vergleich zum Schneckenbohren deutlich höher sind. Das Schneckenbohren wird bevorzugt, wenn die Einbautoleranzen mit herkömmlicher Ausrüstung eingehalten werden können und die Kreuzungslänge und der Durchmesser innerhalb des praktischen Bereichs der Methode liegen.
- Schneckenbohren vs. Rohrrammen: Beim Rammen von Rohren wird ein Stahlgehäuse mithilfe eines pneumatischen Schlaghammers anstelle einer rotierenden Bohrschnecke durch den Boden getrieben. Außer dem Schlaghammer sind keine Maschinen für die Startgrube erforderlich, der Aufbau geht schneller und er kann einige Bodenverhältnisse bewältigen – insbesondere solche mit Felsbrocken oder Geröll –, die beim Bohren mit der Schnecke Probleme bereiten. Die Einschränkung besteht darin, dass das Rammen von Rohren während der Installation keine aktive Bodenentfernung ermöglicht – der Boden wird um die Verrohrung herum komprimiert und nicht ausgehoben –, was zu Setzungen an der Oberfläche führen kann und nicht bei allen Bodenbedingungen geeignet ist. Der kontinuierliche Bodenabtrag des Schneckenbohrens durch die Schneckengänge verringert im Vergleich zum Rohrrammen das Risiko von Oberflächensetzungen und ist daher in empfindlichen Oberflächenumgebungen vorzuziehen.
Wichtige Faktoren, die bei der Auswahl einer Schneckenbohrmaschine zu berücksichtigen sind
Um die richtige Schneckenbohrmaschine für ein Projekt auszuwählen, müssen die Fähigkeiten der Maschine an die spezifischen Installationsanforderungen angepasst werden, sodass ausreichend Kapazität für die erwarteten Bedingungen bereitgestellt wird, ohne dass die Ausrüstung unnötig überdimensioniert wird, was die Mobilisierungskosten erhöht. Die folgenden Faktoren stellen die wesentlichen Spezifikationsparameter dar, die bei der Geräteauswahl zu bewerten sind.
- Maximaler Gehäusedurchmesser und Bohrungsdurchmesserbereich: Die Maschine muss in der Lage sein, den erforderlichen Gehäusedurchmesser durch die vorhandenen Bodenverhältnisse zu treiben. Stellen Sie sicher, dass das Antriebsfutter, die Breite des Raupenrahmens und die Förderschneckenkapazität der Maschine den gesamten Bereich der für das Projekt erforderlichen Durchmesser abdecken, einschließlich aller Abweichungen zwischen verschiedenen Kreuzungen im selben Auftrag.
- Maximale Schubkraft: Die Schubkapazität der Maschine muss den erwarteten maximalen Installationsschub überschreiten, der auf der Grundlage des Gehäusedurchmessers, der Kreuzungslänge, der Bodenreibungsparameter und etwaiger zu erwartender Hindernisse entlang der Bohrstrecke berechnet wird. Wenden Sie bei der Auswahl der Maschinenschubkapazität einen Sicherheitsfaktor von mindestens 1,5 auf den berechneten Installationsschub an, um Schwankungen der Bodenbedingungen und unerwarteten Widerständen Rechnung zu tragen.
- Drehmomentabgabe und Drehzahlbereich: Das Drehmoment des Antriebskopfes muss ausreichen, um den Bohrstrang gegen den Schnittwiderstand und die Bohrguttransportreibung über die gesamte Bohrlänge zu drehen. Die variable Drehzahlregelung ermöglicht es dem Bediener, die Drehzahl für unterschiedliche Bodentypen und -bedingungen zu optimieren, während die Bohrung durch variablen Boden voranschreitet.
- Hublänge: Die hydraulische Hublänge der Maschine bestimmt, wie weit das Gehäuse pro Schubzyklus vorgeschoben wird. Maschinen mit längerem Hub fördern mehr Hülle pro Zyklus und erfordern weniger häufige Stopps, um neue Hüllenabschnitte hinzuzufügen, wodurch die Produktionsraten verbessert werden. Passen Sie die Hublänge an die verfügbare Grubenlänge und die Verbindungslänge des zu installierenden Mantelrohrs an.
- Anforderungen an die Stromversorgung: Bestätigen Sie, ob die Maschine mit Elektro-, Hydraulik- oder Dieselantrieb betrieben wird und dass die erforderliche Stromversorgung am Projektstandort verfügbar ist. Elektrobetriebene Maschinen werden aus Lärm- und Emissionsgründen in engen städtischen Gebieten bevorzugt, erfordern jedoch einen ausreichenden Stromanschluss. Dieselbetriebene Maschinen sind eigenständiger, erzeugen jedoch Abgase und Lärm, die in sensiblen Umgebungen möglicherweise gemindert werden müssen.
- Kompatibilität des Leitsystems: Bestätigen Sie, ob die Maschine mit dem in der Projektspezifikation geforderten Leitsystem kompatibel ist – Laser-, optische, Kamera- oder Pilotrohrführung – und ob die erforderliche Genauigkeit mit der ausgewählten Kombination aus Maschine und Führung unter den erwarteten Bodenbedingungen erreichbar ist.








